Our Projects
Click the titles to see the details
(2021.04~2021.11, ETRI)
다관절 로봇의 물리적 지능을 위한 교시학습 인공지능기술개발
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
연구목표
■ 직접 교시를 통한 사용자 의도 파악(힘/위치)이 가능한 교시학습 알고리즘 개발
■ 7축 다관절 로봇을 활용한 실제 작업에 대한 모방학습 알고리즘 적용 및 검증
연구내용
■ Task 적용 힘/위치 제어시스템을 구축
■ 7축 다관절 로봇을 위한 직접 교시 환경을 구축
■ 다관절 로봇의 힘과 위치 정보를 이용한 교시학습 알고리즘 개발
■ 주어진 Task에 대한 모방학습 알고리즘 적용
■ 적용된 모방학습 알고리즘 성능 평가
**Keywords**
Manipulator, Physical Intelligence, Human-robot cooperation, Imitation learning, Trajectory learning
그림 1. 클리닝 태스크
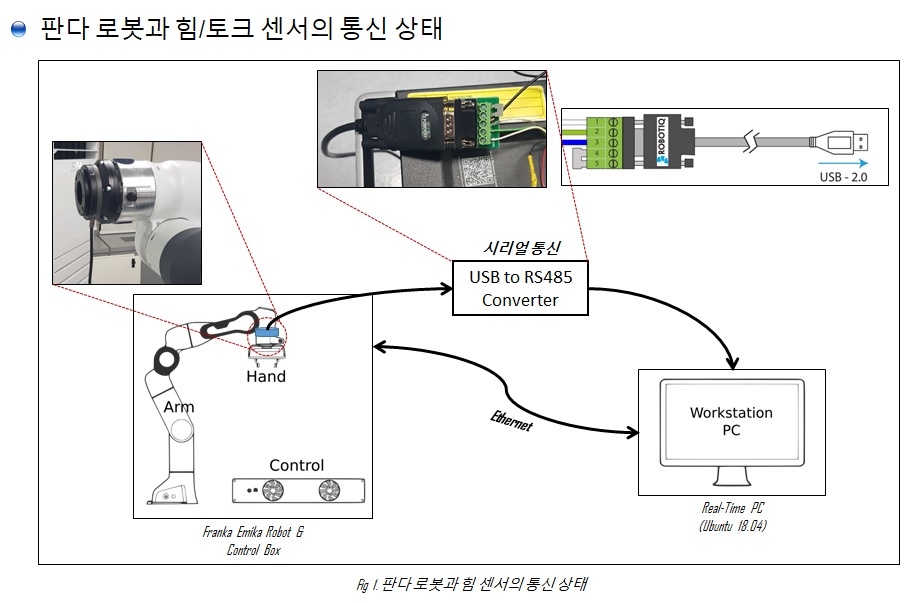
그림 2. 판다로봇과 힘 센서의 통신상태
(2020.05~2020.11, ETRI)
다관절 로봇을 위한 인공지능 모방학습 기술 개발
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
연구목표
■ 로봇의 교시 작업 시 사용자 의도 파악(힘+경로)을 위한 모방학습 알고리즘 개발
■ 다관절 로봇의 모방학습을 이용한 사용자 의도에 따른 접촉력 및 경로 이동작업 적용
연구내용
■ Gazebo 가상환경 기반의 매니퓰레이터를 위한 학습환경 구축
■ ROS를 이용한 로봇 제어시스템 구축
■ 동적 로봇에 발생하는 접촉력을 추정하기 위한 학습알고리즘 개발
■ 매니퓰레이터의 접촉력 및 경로 정보를 이용한 모방학습 알고리즘 개발
■ 사용자 의도 파악을 위한 모방학습 알고리즘 기반의 Drawing task 수행
**Keywords**
Contact Force, Imitation Learning, Trajectory Learning, Inverse Reinforcement Learning, Manipulator
그림 1. 의도를 이용한 모방학습 분류 작업 태스크에 적용
그림 2. 의도를 이용한 모방학습 도형 그리기 태스크에 적용
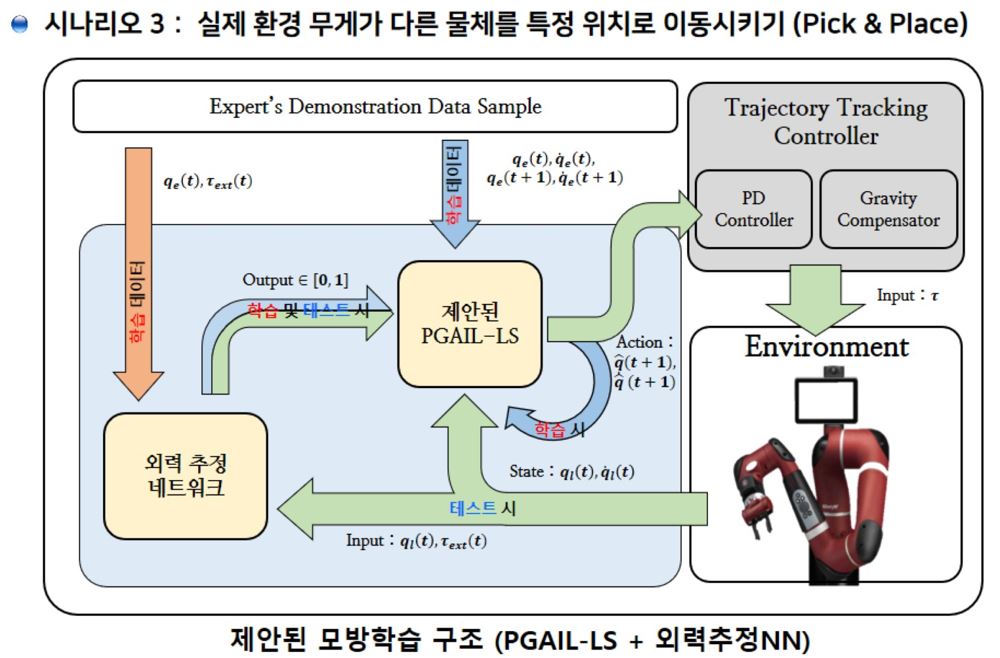
그림 3. 제안하는 모방학습 프레임워크 블록 다이어그램
(2019.06~2023.06, NRF)
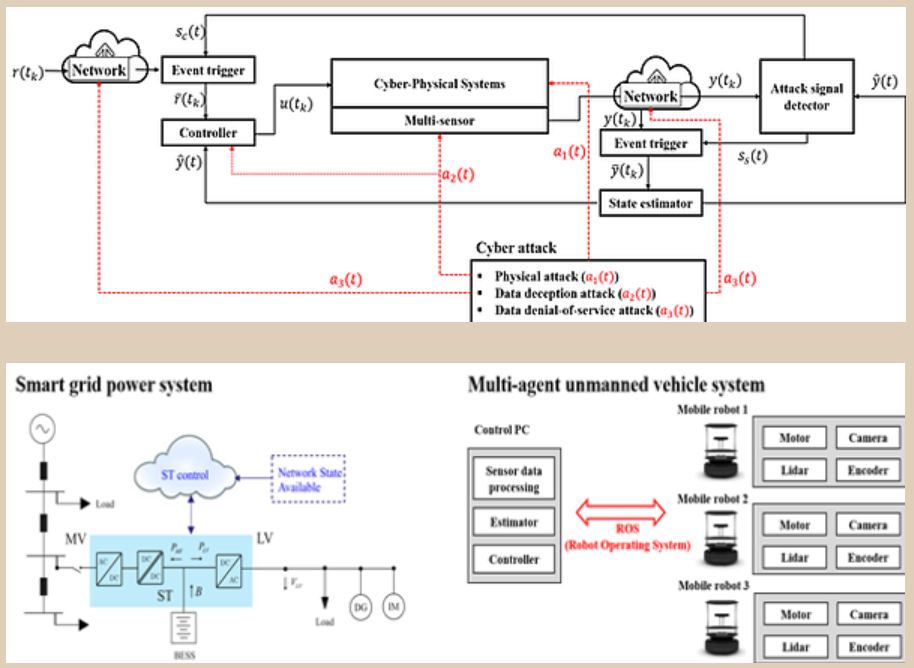
Robust cyber-physical system control against cyber attacks using a sampled-data approach
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
연구목표
**Keywords**
Manipulator, Sensorless system, Force estimator, Impedance control, Human-robot cooperation
(2019.03~2019.11, ETRI)
센서리스 매니퓰레이터의
외력 추정기 및 임피던스 제어기 설계에 대한 연구
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
연구목표
■ 모델 불확실성에 강인한 센서리스 임피던스 제어 알고리즘 개발
■ 7축 로봇 매니퓰레이터 대상 태스크 종속적인 임피던스 제어 타당성 검증
연구내용
■ ROS 기반 로봇 제어 시스템 구축
■ 로봇 매니퓰레이터 모델링
■ 힘 센서리스 시스템 의 엔드 이펙터에 발생하는 외력 검출기 설계
■ 모델 불확실성에 강인한 임피던스 제어기 설계
■ 외력 검출기 기반의 임피던스 제어기 성능 평가
■ 주어진 테스크에 대한 인간-로봇 협업 제어 시스템 구축
**Keywords**
Manipulator, Sensorless system, Force estimator, Impedance control, Human-robot cooperation
그림 1. 외력추정 태스크
(2018.06~2018.11)
2018 R-BIZ challenge 터틀봇3 오토레이스
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
Turtlebot3는 다양한 미션을 자율주행을 통해 수행하기 위해 ROS 기반으로 개발되었다. 로봇의 제어를 Lyapunov function을 이용하여 안정성을 검증하였고, Matlab Computer Vision Toolbox를 이용하여 Object Dection을 구현하였다. 모든 System은 Python으로 구현되었으며 2018 R-BIZ challenge 터틀봇3 오토레이스에서 Mathworks 특별상을 수상했다.
Keywords: Autonomous Vehicle, Visual servoing, Multi-Channel LiDAR , Sensor Fusion
그림 1. 대회주행 영상
(2018.03~2018.11, ETRI)
다중주기 센서융합 기반 이동체 실시간 예측 제어 연구
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
연구목표
■ 다중 샘플링 주기를 가지는 샘플 데이터 시스템을 위한 상태 추정기 설계
■ 불확실성 및 왜란에 대응한 실시간 동작을 위한 모델 기반 예측 제어기 설계
■ 다른 샘플링 주기를 가진 라이다와 카메라를 이용하는 모바일 로봇을 위한 경로 추적 알고리즘 구현 및 적용
연구내용
■ 다중 샘플링 주기를 가지는 샘플 데이터 시스템을 위한 상태 추정기 설계를 위해 새로운 리아프노프 함수 도입 및 안정화 조건 도출
■ 시스템의 제한 조건과 불확실성 및 왜란을 고려하는 explicit MPC 설계
■ ROS 기반의 카메라, 라이라, 모바일 로봇 제어 시스템 구축
■ 카메라와 라이다기반의 모바일 로봇을 위한 경로 추정 알고리즘 설계 및 구현
**Keywords**
Multi-rate sampled-data system, State estimator, Explicit Model predictive control, Mobile robot, tracking control

(2016.11~2019.10, NRF)
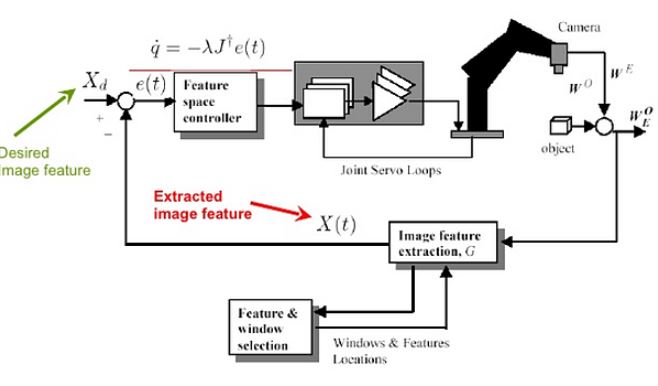
영상검출오류에 강인한 예측 비주얼 서보잉 기법 개발
This project was conducted at Cyber Physical System Control Lab in Kyungpook National University : Link
연구목표
■ 2차년도 연구목표는 영상인식오류에 대한 이벤트 트리거 예측 Visual servoing 방법을 제안하는데 있다. 비주얼 서보잉 시스템을 샘플데이타 방식으로 모델링하고 이에 대해 샘플링, 양자화, 데이터 오류처리 문제를 실제적인 환경에서 고려해 이에 대한 해석을 통해 영상신호처리 및 모델예측제어기 설계를 체계적으로 연구하는데 있다. 해당 연구를 바탕으로 모바일 로봇에 Visual servoing 방법을 적용하는 것을 목표로 한다.
■ 강인한 예측 Visual servoing 시스템에 대한 연구결과를 바탕으로 자율 주행 자동차 시스템에 적용한다. 기존의 자율 주행 자동차 연구의 경우, 고전적인 제어방식으로 전후방 차량감지 및 주변 환경을 감지하기 위해 추가적인 센서를 장착하고 이를 바탕으로 제어하는 방법을 사용한다. 해당 연구에서는 기존 연구를 활용하여 인간이 자동차 운전을 하는 방법과 같이 백미러와, 전방, 좌우 사이드미러의 이미지를 기반으로 정속주행과 조향제어가 가능한 자율주행 방법을 개발하는데 중점을 둔다.
연구내용
**Keywords**
Multi-rate sampled-data system, State estimator, Explicit Model predictive control, Mobile robot, tracking control